Nástroj pro modelování mapy akustického vlivu (AIM) byl představen společně s uvedením defektoskopu OmniScan™ X3 a stal se integrálním nástrojem, který pomáhá s návrhem plánu skenování při použití techniky úplné fokusace (TFM). AIM poskytuje odhad pokrytí intenzitou akustického vlnění pro různé TFM soubory vln a typy rozptylu a umožňuje tak vytvořit plán skenování, který maximalizuje pravděpodobnost detekce (POD).
Uvedením MXU 5.10 získáváte výhody třech hlavních upgradů AIM, které dále vylepšují možnosti a usnadňují použití nástroje pro vytváření plánů skenování přístrojů OmniScan X3 a X3 64.
1. Podpora pro geometrie vyžadující 3D kontrolu
V předchozích verzích nástroj AIM podporoval pouze lineární sondy, u kterých oblast kontroly leží přímo pod osou elementů. Nová aktualizace mapy akustického vlivu (AIM), MXU 5.10, podporuje sondy typu Dual Linear Array™ (DLA) a Dual Matrix Array™ (DMA) určené pro geometrie rovinného, obvodového vnějšího průměru (COD) a axiálního vnějšího průměru (AOD). Tato změna je umožněna díky zásadnímu přepracování základního rámce modelu AIM.
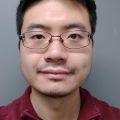
Aktualizovaný model AIM poskytuje podobné výsledky jako některé jiné komerčně dostupně softwarové balíčky pro akustickou simulaci. Například, porovnejte níže uvedené obrázky vytvořené aktualizovaným modelem AIM a mapou citlivosti získanou z CIVA 2021 (vyvinuto CEA LIST) pro soubor vln L-L TFM na geometrii AOD.
Porovnání sondy A27 pro AOD geometrie v režimu L-L, model AIM (vlevo) ve srovnání se softwarem CIVA (vpravo)
Při této zkoušce byla použita konfigurace se sondou 4DM16X2SM-A27 a klínem SA27-DN55L-FD25-IHC-AOD10.75 na potrubí o vnějším průměru 273,05 mm (10,75 palce). Jak vidíte, aktualizovaný model AIM a model CIVA 2021 poskytují u této AOD geometrie pro DMA sondu téměř identickou mapu.
2. Zlepšená přesnost v blízkém poli sondy
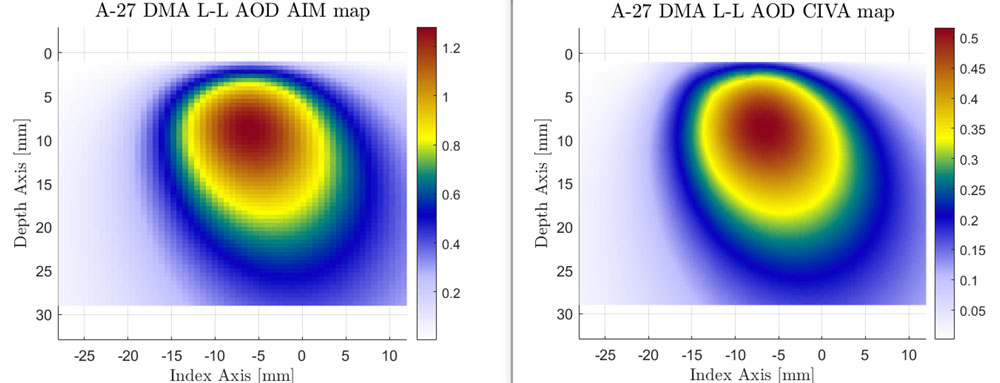
Druhou výhodou přepracovaného modelu AIM je lepší přesnost simulace v blízkém poli sondy. Vzhledem k tomu, že zlepšená přesnost je lépe vidět u kontaktních kontrol, byla k přípravě níže uvedených obrázků, použitých jako příklad, použita jednoměničová kontaktní sonda. Velikost měniče sondy je 1 mm × 10 mm a středová frekvence je 5 MHz.
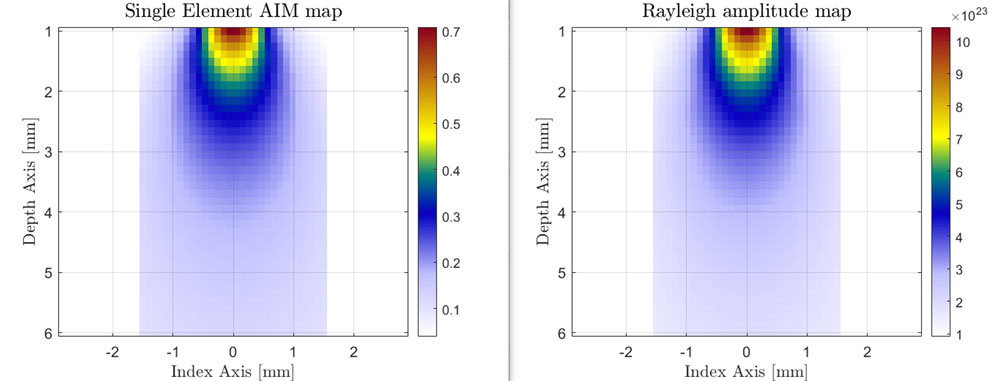
Na obrázcích je zobrazena odezva jednoměničové sondy v blízkém poli v předchozím a ve vylepšeném modelu AIM, vždy ve srovnání s numerickým modelem založeným na Rayleighově rozptylu. Přesný model založený na Rayleighově rozptylu je vytvořen sečtením příspěvků od 100 000 rovnoměrně rozložených bodových zdrojů na povrchu jednoho měniče.
Srovnání vylepšené mapy AIM s přesným modelem Rayleighova rozptylu pro jednoměničovou sondu v režimu L-L
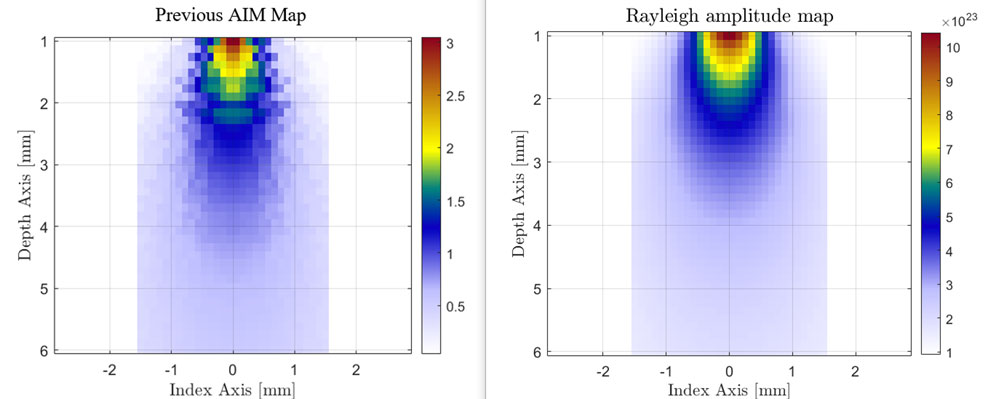
Srovnání předchozí mapy AIM s přesným modelem Rayleighova rozptylu pro jednoměničovou sondu v režimu L-L
Všimněte si podobnosti zlepšeného modelu AIM s modelem Rayleighova rozptylu dokonce i v pozorovací vzdálenosti 1 mm (0,04 palce) od povrchu elementu. Předchozí model AIM naopak vykazoval v blízkém poli oscilace, které mohly mít v kontaktním režimu vliv na přesnost simulací v blízkém poli.
3. Normalizovaný index citlivosti
Před uvedením MXU verze 5.10 byl index citlivosti AIM vyjadřován v libovolných jednotkách a mohl tak být použit pouze ke srovnání relativní citlivosti mezi různými soubory vln. Nyní můžeme přenastavit index citlivosti, tak, aby umožňoval intuitivnější interpretaci citlivosti plánu skenování. V další části se dozvíte více o výpočtech, které software MXU provádí za účelem vygenerování indexu citlivosti pro jednotlivé mapy AIM. Dále pak naleznete některé konkrétní příklady, které vám ukážou, jak interpretovat normalizovaný index citlivosti a jak ho využít v praxi.
Výpočet teoretického maxima indexu citlivosti AIM
Index citlivosti odpovídá hodnotě maximální amplitudy v mapě AIM. Amplituda pro jednotlivé pixely je určena 3 složkami (odezva vysílání, odezva přijímání a koeficient rozptylu):
(1)
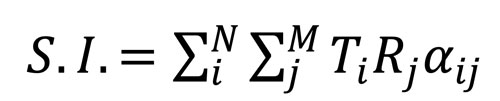
Význam výrazů použitých v rovnici (1) je následující:
- N je počet vysílacích elementů a M je počet přijímacích elementů.
- Ti je vysílací odezva i-tého vysílacího elementu. Maximální hodnota 1 odpovídá dokonalému vysílání. Jinými slovy, vyslaná intenzita má v pixelu stejnou hodnotu jako intenzita na čele vysílacího elementu.
- Rj je přijímací odezva j-tého přijímacího elementu. Maximální hodnota 1 odpovídá dokonalému přijímání. Jinými slovy, rozptýlená intenzita je dokonale přijata na čele přijímacího elementu.
- αijreprezentuje koeficient rozptylu od i-tého vysílacího prvku k j-tému přijímacímu prvku. Maximální hodnota 1 odpovídá dokonalému rozptylu. Jinými slovy, intenzita dopadající na pixel je dokonale rozptýlena do směru příjmu.
Z rovnice (1) vyplývá, že teoretická maximální hodnota citlivosti je NM, kde N je počet vysílacích prvků a M je počet přijímacích prvků. Nicméně v typických konfiguracích uspořádání techniky TFM nelze této hodnoty dosáhnout.
Rozdíly indexu citlivosti u planárních a sférických rozptylujících prvků
Stejně jako u předchozích verzí AIM i AIM verze MXU 5.10 podporuje jak „sférické“, tak i „planární“ rozptylující prvky. V aktualizovaném modelu AIM je se sférickým rozptylujícím prvkem zacházeno jako s ideálním bodovým rozptylujícím prvkem, kdy je dopadající intenzita na pixelu dokonale rozptýlena do přijímacího směru. Jinými slovy, αij má pro všechny kombinace vysílačů a přijímačů hodnotu 1.
Planární rozptylovací prvek je v modelu AIM modelován jako kruhový prázdný prostor o průměru 3 mm. Koeficient rozptylu αij je komplexní funkcí frekvence a vektorů kolmice, dopadu, odrazu a pozorování ve 3D prostoru. Tyto vektory jsou schematicky znázorněny na obrázku:
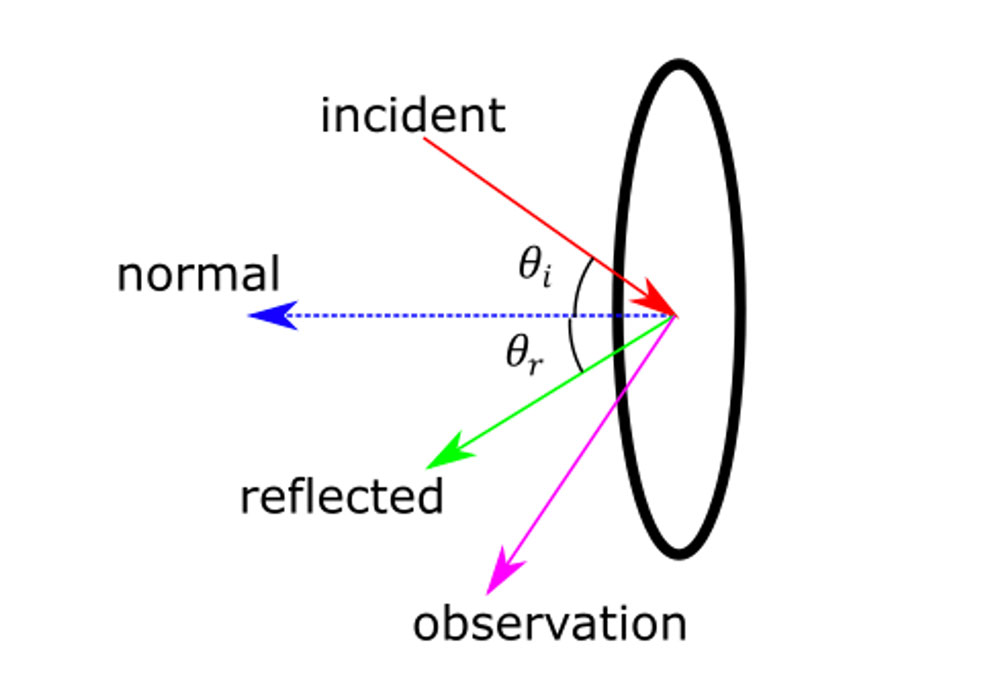
Schématické zobrazení kolmice, vektorů dopadu, odrazu a pozorování pro kruhový prázdný prostor
U tohoto příkladu kruhového prázdného prostoru, znázorněného na obr. 4, by úhel odrazu θr byl roven úhlu dopadu θi v případě, že by nedocházelo ke konverzi módu na povrchu směrového rozptylujícího prvku. Je třeba také poznamenat, že vektor pozorování nemusí ležet v rovině tvořené vektory kolmice, dopadu a odrazu.
U tohoto typu rozptylujícího prvku se maximální hodnoty αij, která činí 1, dosáhne v případě, že vektory dopadu, odrazu a pozorování všechny koincidují s vektorem kolmice. To je případ režimu impulz-echo v případě, že vysílaný a přijímaný svazek jsou dokonale kolmé ke směru vady. Protože hodnota αij je rovna 1 pouze v určité podmnožině kombinací Tx/Rx, obecně platí, že index citlivosti pro mapy AIM planárních rozptylujících prvků je nižší než odpovídající index citlivosti pro ideální sférický rozptylující prvek.
Jak interpretovat a porovnat normalizovaný index citlivosti nástroje AIM
V této části jsou popsány příklady map AIM a jejich indexy citlivosti pro tři různé konfigurace s použitím stejné lineární sondy 5L32-A32. Pod každým příkladem vždy naleznete vysvětlení, jak daný příklad interpretovat.
V první konfiguraci je sonda použita v kontaktním L-L režimu. Zde je zobrazena příslušná mapa AIM pro sférický rozptylující prvek:
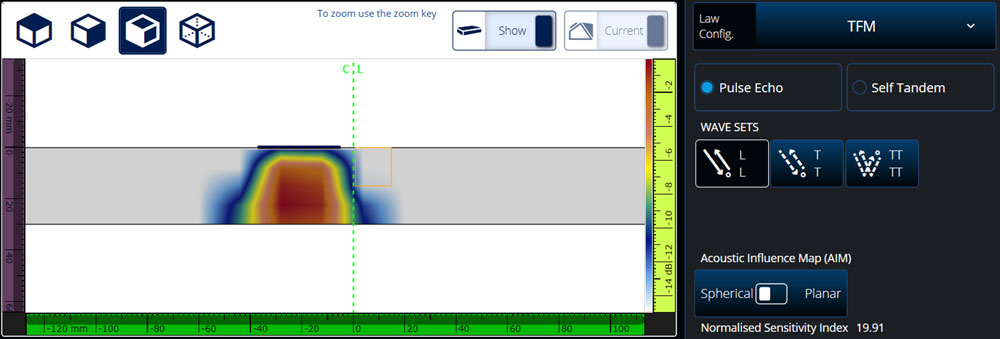
Konfigurace 1: Sférická mapa AIM při použití kontaktního L-L režimu (index citlivosti = 19,91)
Normalizovaný index citlivosti pro tuto konfiguraci je 19,91, přestože teoretická maximální hodnota je 1024 (32 vysílacích a 32 přijímacích elementů). Odchylka od maximální hodnoty je způsobena převážně směrovostí elementů a geometrickým rozšířením svazku.
U druhé konfigurace je sonda navázána na klín SA32LS-N55S-Group D a je použita v režimu T-T pro geometrii COD. Vnější průměr trubky je nastaven na 273,05 mm (10,75 palce). Příslušná mapa AIM pro sférický rozptylující prvek je zobrazena zde:
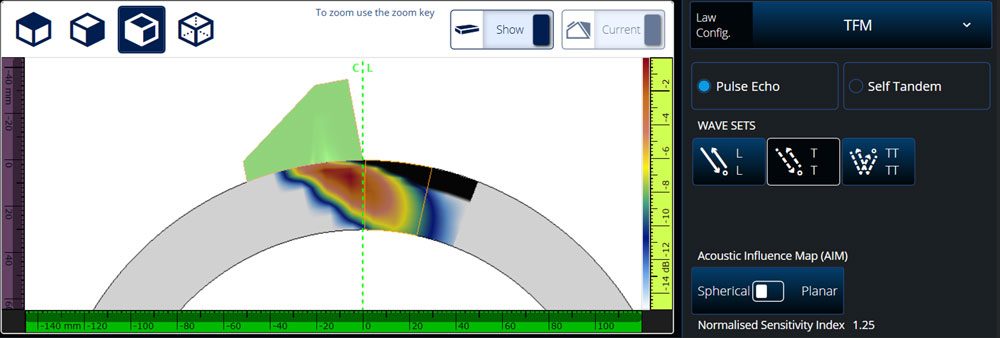
Konfigurace 2: Sférická mapa AIM při použití režimu COD T-T (index citlivosti = 1,25)
Na této mapě AIM si všimněte, že se na ní v blízkosti povrchu vnějšího průměru přímo pod klínem nacházejí černé pixely. Tyto černé pixely znamenají, že akustickou dráhu nelze z elementu do pixelu sledovat, a to z důvodu fyzických hranic klínu. Všimněte si, že index citlivosti je nyní 1,25, což znamená, že je potřeba dalších 24 dB zesílení k dosažení stejné očekávané úrovně amplitudy vady jako v předchozí kontaktní konfiguraci. Snížení indexu citlivosti je způsobeno převážně větším geometrickým rozšířením svazku a komplexními koeficienty lomu na rozhraní klínu s dílem.
Třetí konfigurace je stejná jako druhá, avšak s tím rozdílem, že v tomto případě se jedná o mapu AIM pro planární reflektor:
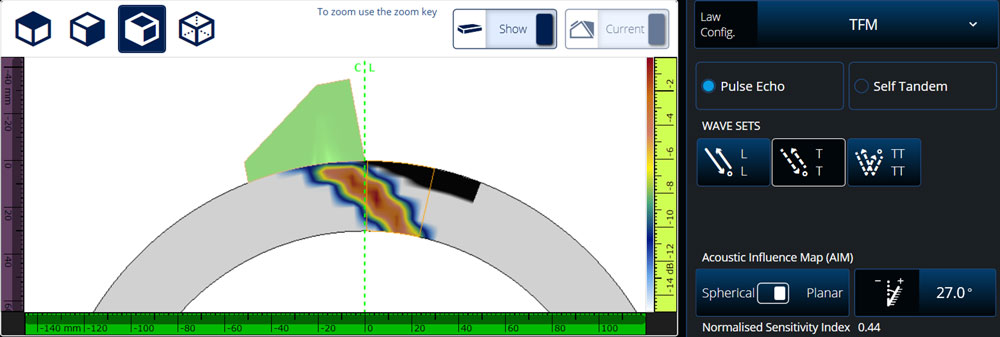
Konfigurace 3: Planární mapa AIM při použití režimu COD T-T (index citlivosti = 1,25)
Úhel vady byl nastaven na 27°, takže kolmice vady je převážně kolmá ke směru šíření hlavního svazku. I při optimální orientaci vady je index citlivosti pro planární rozptylující prvek pouze 0,44. Index citlivosti je nižší než je jeho úroveň u předchozí mapy, kde činí 1,25, protože nelze dosáhnout dokonalé kolmosti povrchu vady vůči směru šíření svazku pro všechny kombinace vysílacích a přijímacích elementů.
Chcete-li aktualizovat svoji verzi na verzi MXU 5.10 a začít těžit z výhod nových upgradů nástroje AIM, přejděte na stránku Stažení softwaru (a posuňte se dolů na „OmniScan“).
Související obsah
Bílá kniha: Mapa akustického vlivu TFM
Často kladené otázky (FAQ) k technice TFM
Často kladené otázky ohledně fázově koherentního zobrazování (PCI)
Kontaktujte nás