Desde que a ferramenta de modelagem de mapa de influência acústica (AIM) foi introduzida com o lançamento do detector de falhas OmniScan™ X3, ela se tornou uma ferramenta de assistência integral para projetar planos de rastreamento de método de foco total (TFM). O AIM oferece uma estimativa da cobertura da intensidade acústica do método de foco total para diferentes conjuntos de ondas e tipos de espalhador, o que permite criar um plano de rastreamento que maximiza a probabilidade de detecção (POD).
Com o lançamento do MXU 5.10, você se beneficiará com três grandes atualizações ao AIM que melhoram ainda mais as capacidades e a facilidade de uso da ferramenta de planejamento de rastreamento OmniScan X3 e X3 64.
1. Suporte para geometrias de inspeção 3D
Antes, o AIM era compatível apenas com sondas lineares para as quais a área de inspeção de método de foco total está diretamente abaixo do eixo principal dos elementos. Agora, com a atualização do MXU 5.10, o AIM é compatível com sondas Dual Linear Array™ (DLA) e Dual Matrix Array™ (DMA) para geometrias planas, de diâmetro externo circunferencial (COD) e de diâmetro externo axial (AOD). Uma grande reforma da estrutura fundamental do modelo de AIM permitiu essa alteração.
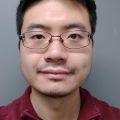
O modelo de AIM atualizado oferece resultados semelhantes a alguns outros pacotes de software de simulação acústica comercial. Por exemplo, compare as imagens abaixo geradas pelo modelo de AIM atualizado com o mapa de sensibilidade obtido do CIVA 2021 (desenvolvido pela CEA LIST) para o conjunto de ondas de método de foco total L-L definido na geometria de AOD.
Comparação da geometria de AOD da sonda A27 no modo L-L, modelo de AIM (esquerda) e software CIVA (DIREITA)
Para esse caso de teste, a configuração incluía uma sonda 4DM16X2SM-A27 e um calço SA27-DN55L-FD25-IHC-AOD10.75 em um tubo com 273,05 mm de diâmetro externo (10,75 polegadas). Como você pode ver, o modelo AIM atualizado e o modelo CIVA 2021 oferecem mapas quase idênticos para a sonda DMA nessa geometria de AOD.
2. Melhor precisão no campo próximo da sonda
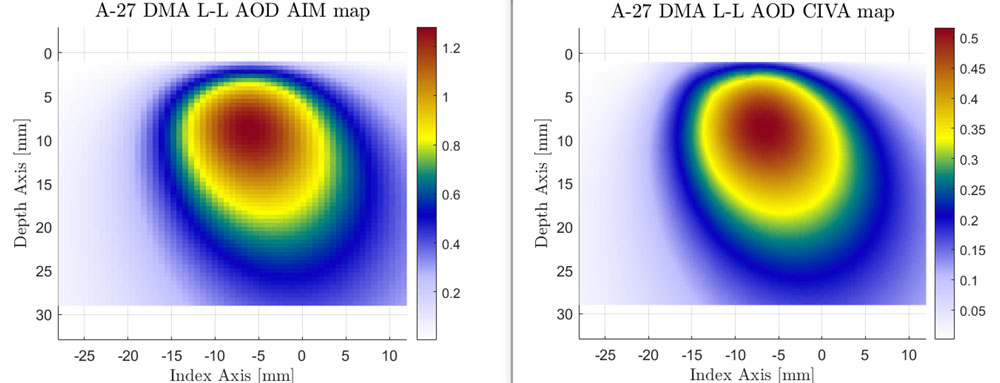
Um segundo benefício do modelo de AIM reformado é a melhor precisão da simulação no campo próximo da sonda. Como a maior precisão é mais evidente nas inspeções de contato, um transdutor de contato de único elemento foi usado para preparar os exemplos de imagens abaixo. As dimensões do elemento são 1 mm × 10 mm e a frequência central é 5 MHz.
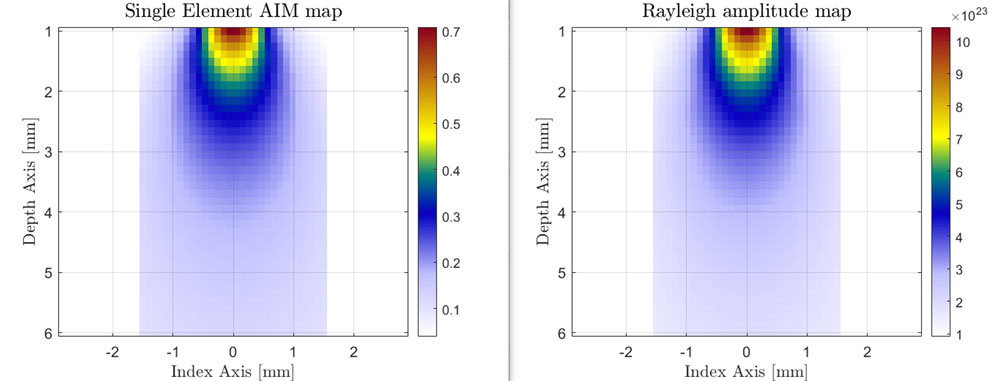
Essas imagens mostram a resposta de campo próximo de único elemento dos modelos de AIM anterior e melhorado em comparação com o modelo numérico Rayleigh exato. O modelo Rayleigh exato é construído com a soma das contribuições de 100.000 origens de ponto distribuídas uniformemente na superfície do elemento único.
AIM melhorado vs. modelo exato Rayleigh para transdutor de elemento único no modo L-L
AIM anterior vs. modelo exato Rayleigh para transdutor de elemento único no modo L-L
Observe a similaridade entre o modelo AIM melhorado e o modelo Rayleigh mesmo a uma distância de observação de 1 mm (0,04 polegada) da superfície do elemento. Em comparação, o modelo AIM anterior tinha oscilações no campo próximo que poderiam afetar a precisão das simulações de modo de contato de campo próximo.
3. Índice de sensibilidade normalizada
Antes do MXU 5.10, o índice de sensibilidade do AIM estava em unidades proporcionais arbitrárias que podiam ser usadas apenas para comparar a sensibilidade relativa entre diferentes conjuntos de ondas. O índice de sensibilidade foi redimensionado para oferecer uma interpretação mais intuitiva da sensibilidade de um plano de rastreamento. Na próxima seção, você conhecerá os cálculos que o software MXU realiza para gerar o índice de sensibilidade de cada mapa de AIM. Depois, no entanto, você encontrará alguns exemplos concretos que mostrarão como interpretar o índice de sensibilidade normalizado e aplicá-lo na prática.
Cálculo do máximo teórico do índice de sensibilidade do AIM
O índice de sensibilidade corresponde ao valor de amplitude máximo no mapa do AIM. Para cada pixel, a amplitude é determinada por 3 componentes (a resposta de transmissão, a resposta de recepção e o coeficiente de dispersão):
(1)
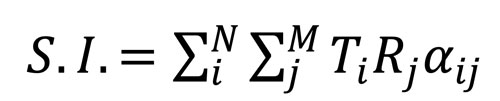
Estas são as definições da equação (1):
- N é o número de elementos de transmissão e M é o número de elementos de recepção.
- Ti é a resposta de transmissão do iº elemento de transmissão. O valor máximo de 1 representa a transmissão perfeita. Em outras palavras, a intensidade transmitida no pixel é o mesmo valor da intensidade na face do elemento de transmissão.
- Rj é a resposta de recepção do jº elemento de recepção. Um valor máximo de 1 representa a recepção perfeita. Em outras palavras, a intensidade dispersa é perfeitamente recebida na face do elemento de recepção.
- αijrepresenta o coeficiente de dispersão do iº elemento de transmissão ao jº elemento de recepção. Um valor máximo de 1 representa a dispersão perfeita. Em outras palavras, a intensidade do incidente no pixel é perfeitamente dispersa na direção da recepção.
A equação (1) mostra que o valor máximo teórico da sensibilidade é NM se houver N elementos de transmissão e M elementos de recepção. No entanto, esse valor não seria atingido em configurações de TFM comuns.
Diferenças no índice de sensibilidade para tipos de dispersor plano e esférico
Como nas versões anteriores de AIM, o AIM no MXU 5.10 é compatível com dispersores "esféricos" e "planos". No modelo de AIM atualizado, o dispersor esférico é tratado como um dispersor de ponto ideal em que a intensidade do incidente no pixel é perfeitamente dispersa na direção da recepção. Em outras palavras, αij tem o valor de 1 para todas as combinações de transmissores e receptores.
O dispersor plano no AIM é modelado como um vão circular de 3 mm de diâmetro. O coeficiente de dispersão αij é uma função complexa da frequência, além dos vetores normal, incidente, refletido e de observação no espaço tridimensional. Este é um desenho esquemático que mostra esses vetores:
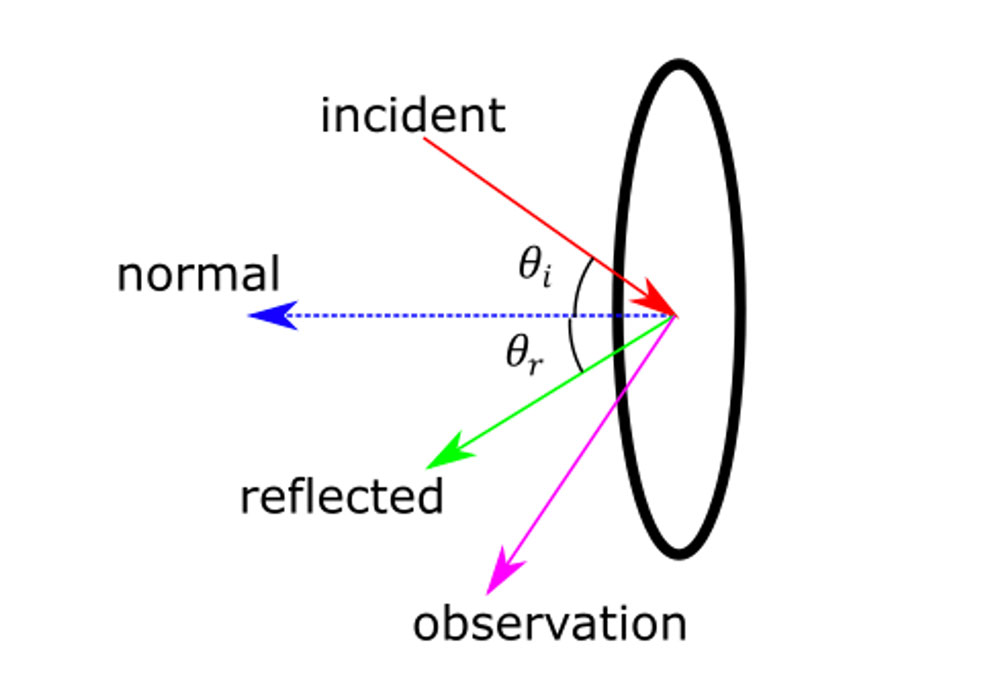
Esquema de vetores normal, incidente, refletido e de observação de um vão circular
Para esse exemplo de vão circular, na Figura 4, o ângulo refletido θr seria igual ao ângulo de incidência θi se não houver conversão de modo na superfície do dispersor direcional. Também seria observado que o vetor de observação não está no plano formado pelos vetores normal, incidente e refletido.
Para esse tipo de dispersor, o valor máximo de αij de 1 é atingido se os vetores incidente, refletido e de observação forem coincidentes ao vetor normal. Esse seria o caso no modo de pulso-eco se os feixes de transmissão e recepção fossem perfeitamente perpendiculares à falha direcional. Como o valor de αij é 1 apenas para um subconjunto especial de combinações Tx/Rx, em geral, o índice de sensibilidade dos mapas de AIM de um dispersor plano seria menor do que o índice de sensibilidade correspondente de um dispersor esférico ideal.
Como interpretar e comparar o índice de sensibilidade normalizado do AIM
Exemplos de mapas de AIM e seus índices de sensibilidade para três configurações diferentes que usam a mesma sonda linear 5L32-A32 são mostrados nesta seção. Abaixo de cada exemplo, você encontrará uma explicação sobre como interpretá-las.
Na primeira configuração, a sonda é usada no modo L-L de contato e o mapa do AIM correspondente a um dispersor esférico é mostrado aqui:
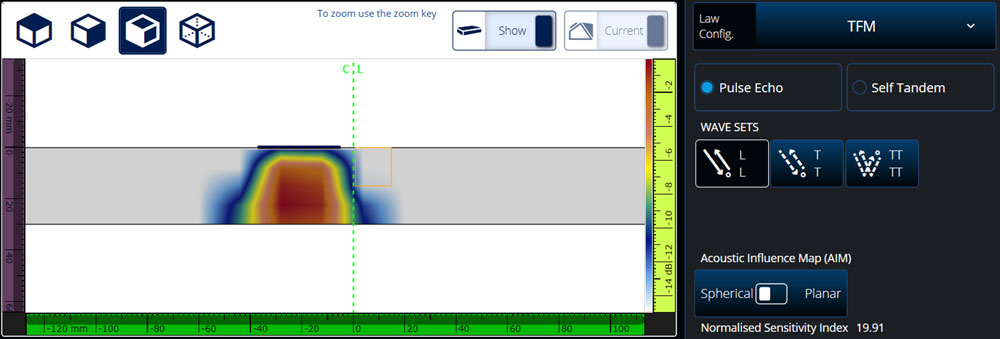
Configuração 1: Mapa de AIM esférico do modo L-L de contato (índice de sensibilidade = 19,91)
Nessa configuração, o índice de sensibilidade normalizado é 19,91 mesmo que o valor teórico máximo seja 1024 (32 elementos de transmissão e 32 de recepção). O desvio do valor máximo se deve principalmente à direcionalidade do elemento e da dispersão geométrica do feixe.
Na segunda configuração, a sonda é acoplada a um calço SA32LS-N55S-Grupo D e é usada no modo T-T para geometria COD. O diâmetro externo do tubo é configurado para 273,05 mm (10,75 polegadas). O mapa de AIM correspondente de um dispersor esférico é mostrado aqui:
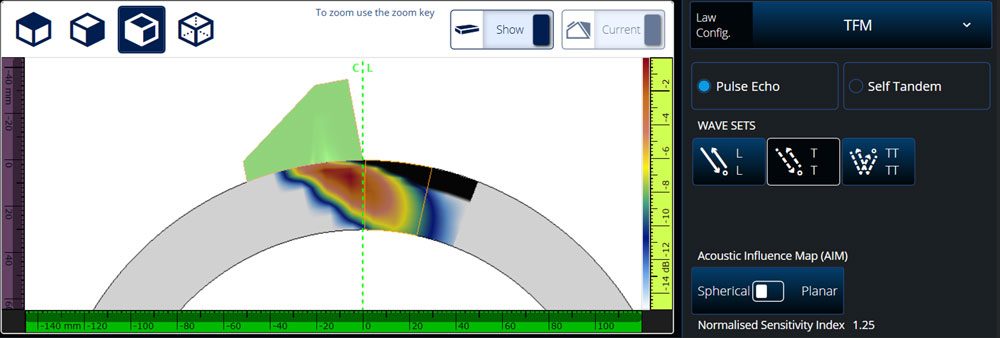
Configuração 2: Mapa de AIM esférico no modo T-T do COD (índice de sensibilidade = 1,25)
Nesse mapa de AIM, você notará que há alguns pixels pretos perto da superfície do diâmetro externo diretamente na frente do calço. Eles indicam que pelo menos um trajeto acústico não pode ser traçado a partir do elemento do pixel devido aos limites físicos do calço. Observe que o índice de sensibilidade agora é 1,25, o que indica que um ganho de 24 dB é necessário para obter o mesmo nível de amplitude de falha esperado da configuração de contato anterior. A redução no índice de sensibilidade deve-se principalmente ao aumento da dispersão geométrica do feixe e dos coeficientes de refração complexa na interface do calço com a peça.
A terceira configuração é igual à segunda, mas este mapa de AIM é para um refletor plano:
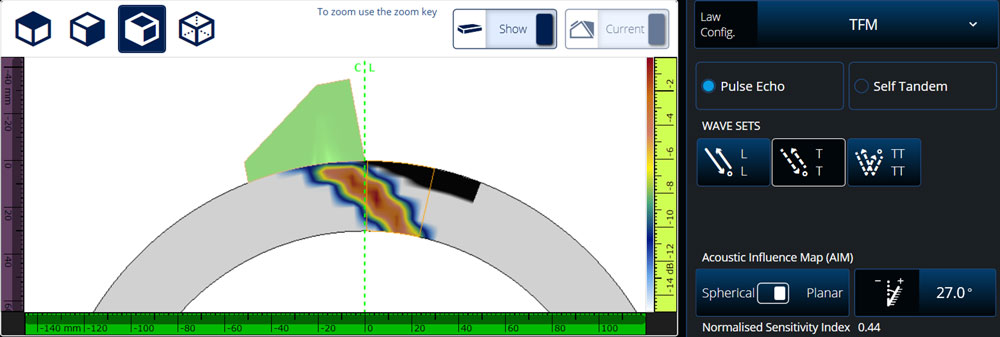
Configuração 3: Mapa de AIM plano no modo T-T do COD (índice de sensibilidade = 1,25)
O ângulo de falha foi definido como 27° de forma que a normal da falha é quase perpendicular à direção de propagação do feixe principal. Mesmo com a orientação de falha ideal, o índice de sensibilidade do dispersor plano é de apenas 0,44. O índice de sensibilidade é menor que o do nível do mapa anterior de 1,25 porque a perpendicularidade perfeita entre a superfície da falha e a direção de propagação do feixe não pode ser atingida para todas as combinações de elementos de transmissão e de recepção.
Você pode acessar nossa página de Downloads de software (e ir até “OmniScan”) para atualizar o MXU 5.10 e começar a aproveitar essas novas atualizações do AIM.
Conteúdo relacionado
White paper: Mapa de influência acústica do TFM
Perguntas frequentes sobre TFM
Marque essa página! Acesse nossos recursos de método de foco total (TFM) em um local conveniente
Perguntas frequentes sobre a formação de imagem de coerência de fase
Entre em contato