Přehled mapy akustického vlivu a indexu citlivosti
Mapa akustického vlivu (AIM) představená v detektoru vad OmniScan™ X3 je cenným softwarovým asistenčním nástrojem pro nastavení plánů snímání pomocí metody TFM (Total Focusing Method). AIM předpovídá pokrytí akustickým paprskem pro každou kombinaci drah šíření vln (vlnových sad) tak, aby kontrolor mohl optimalizovat plán snímání TFM s ohledem na zvýšení pravděpodobnosti detekce. Protože je však každá mapa AIM normalizována a zobrazena v logaritmické amplitudové stupnici od 0 do -15 dB, není možné ze samotných map AIM odvodit relativní akustickou citlivost mezi různými plány snímání TFM. Pro usnadnění tohoto porovnání je nad všemi mapami AIM zobrazen index citlivosti.
Možnosti využití indexu citlivosti AIM
Index citlivosti je jednoduše maximální amplituda každé mapy AIM před normalizací a je zobrazen v arbitrárních jednotkách, které jsou úměrné předpokládané amplitudě napětí při příjmu. Kombinací informací o mapách AIM spolu s jejich indexy citlivosti mohou uživatelé porovnávat akustické citlivosti různých kontrolních uspořádání TFM.
Ilustrativní příklad
V této aplikační poznámce uvádíme příklad pro výběr optimálního kontrolního režimu TFM pro daný scénář kontroly na základě informací poskytnutých z AIM a indexu citlivosti. I když je příklad zaměřen na výběr optimálního režimu TFM, zavedený postup lze také použít k usnadnění výběru kombinace sondy a klínu pro předem určený režim TFM.
V tomto příkladu je naším cílem zvolit optimální režim TFM pro kontrolu povrchové praskliny v ploché tyči o tloušťce 25 mm pomocí sondy 5L32-A32 v kombinaci se šikmým klínem SA32-N55S. Naše vyhledávání omezujeme na režimy vlastních tandemů, protože obecně jsou vhodnější pro výrobu snímků TFM s odpovídající geometrií vertikálních prasklin. V aktuální verzi (5.1) softwaru OmniScan™ MXU je k dispozici 7 režimů vlastních tandemů a jejich odpovídající mapy AIM jsou znázorněny na obrázcích 1 až 7. Pro tyto mapy AIM jsme zvolili rovinný režim vad s úhlem vad 0° tak, aby odpovídal očekávané orientaci povrchové praskliny.
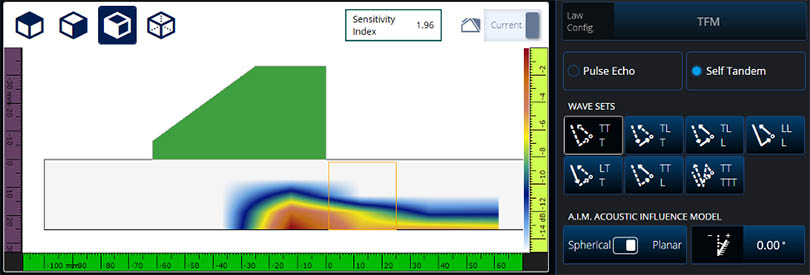
Obrázek 1: rovinná mapa AIM pro režim TT-T
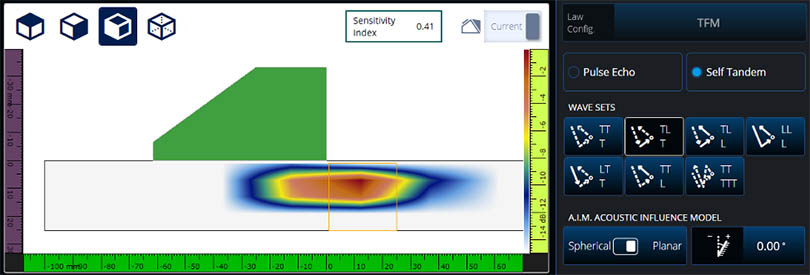
Obrázek 2: rovinná mapa AIM pro režim TL-T
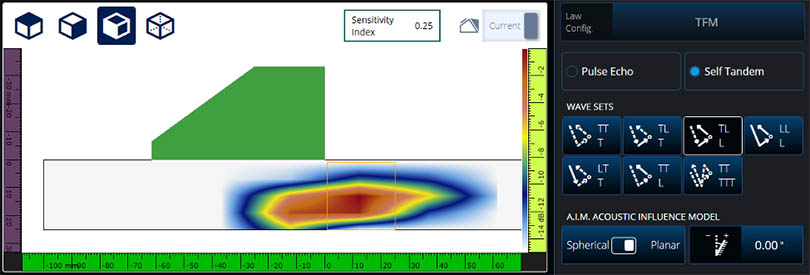
Obrázek 3: rovinná mapa AIM pro režim TL-L
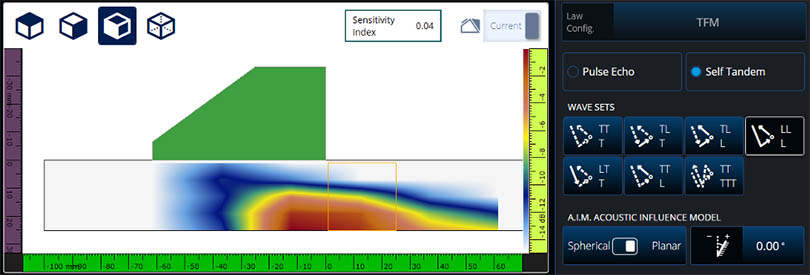
Obrázek 4: rovinná mapa AIM pro režim LL-L
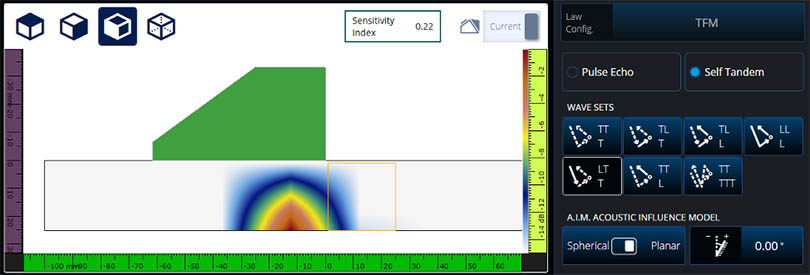
Obrázek 5: rovinná mapa AIM pro režim LT-T
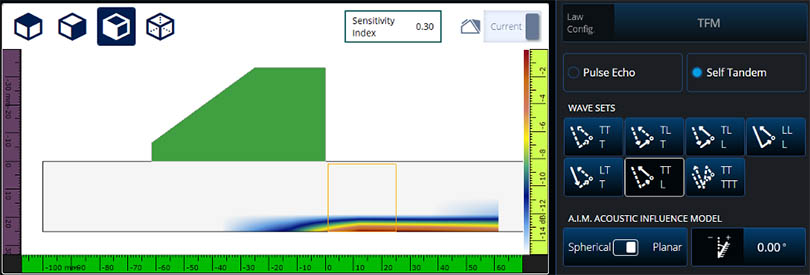
Obrázek 6: rovinná mapa AIM pro režim TT-L
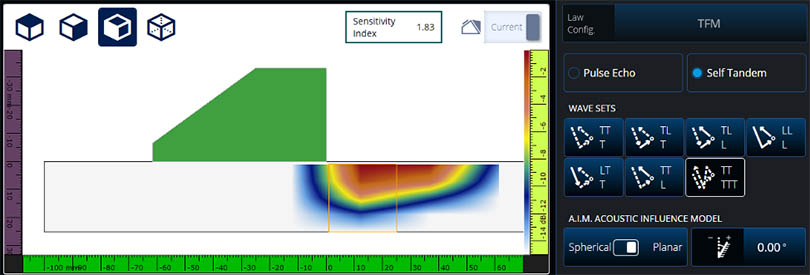
Obrázek 7: rovinná mapa AIM pro režim TT-TTT (5T)
Porovnání indexů citlivosti vlnových sad TFM
Z map AIM vidíme, že pro tento scénář kontroly jsou pravděpodobně optimální režimy TL-T a TT-TTT (5T), protože mají nejlepší akustické pokrytí v blízkosti horního povrchu tyče. Porovnáme-li jejich indexy citlivosti, vidíme, že režim 5T má index citlivosti 1,83, zatímco režim TL-T má index citlivosti 0,41. Na základě těchto informací bychom očekávali, že režim 5T bude mít přibližně 4,5krát lepší poměr signálu k šumu (SNR) než režim TL-T. Experimentální snímky TFM získané pomocí těchto dvou režimů jsou znázorněny na obrázku 8.
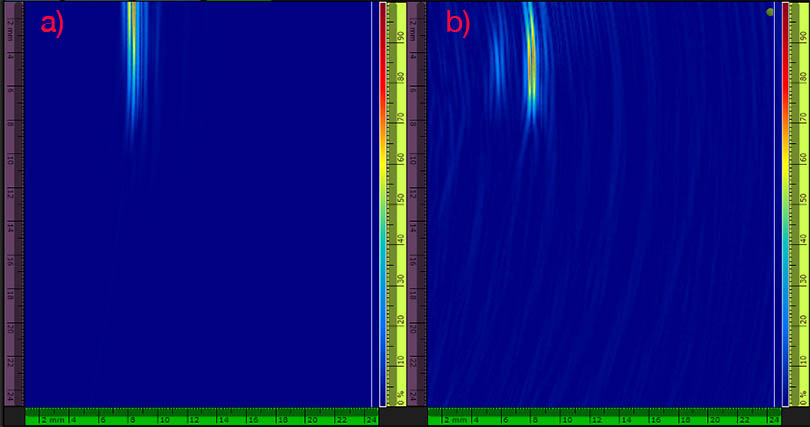
Obrázek 8: snímky TFM získané pomocí režimu 5T (a) a TL-T (b). Pro (a) byl použit analogový zisk 16 dB a pro (b) 35 dB.
Na obrázku 8 byly analogové hodnoty zesílení pro režimy 5T a TL-T nastaveny na 16 dB a 35 dB tak, aby hodnoty maximální amplitudy pro oba režimy byly 80 %. V důsledku toho má režim 5T o 19 dB (~ 8krát) lepší akustickou citlivost ve srovnání s režimem TL-T. To je také patrné z nižší úrovně šumu na pozadí přítomného ve snímku TFM 5T. Rozdíl v akustické citlivosti naměřený experimentálně a předpovídaný indexem citlivosti AIM lze připsat odchylce skutečné trhliny od ideálního rovinného odražeče. Z obrázku 8 je také patrné, že režim 5T je přesnější v reprezentaci povrchové povahy vertikální trhliny, jak bylo předpovězeno na mapách AIM znázorněných na obrázcích 2 a 7.
Souhrn procedury výběru optimálního režimu TFM pomocí AIM
Výše uvedený příklad ukazuje, že AIM dokáže přesně modelovat akustické pokrytí daného režimu TFM a index citlivosti lze použít k předpovězení relativní akustické citlivosti mezi různými režimy TFM.
Souhrnný postup pro výběr optimálního režimu TFM je následující:
- Vygenerujte mapy AIM pro všechny režimy TFM, které jsou relevantní pro konfiguraci kontroly. Ujistěte se, že je zvoleno správné nastavení vad (např. sférické vs. rovinné, orientace rovinných vad).
- Vyberte podmnožinu režimů TFM, pro které jejich odpovídající mapy AIM poskytují odpovídající akustické pokrytí v oblasti zájmu. Pro pokrytí různých částí oblasti zájmu může být nezbytné použít více doplňkových režimů TFM.
- Z podmnožiny režimů TFM vyberte režimy s nejvyšším indexem citlivosti AIM.