Introdução
As superfícies externas e internas dos tubos de aço carbono tendem a sofrer corrosão ao longo do tempo, independente do ambiente que elas estão. É preciso realizar inspeções regulares desta corrosão para avaliar e monitorar a integridade do tubo. O HydroFORM® corrosion scanner é muito útil para medir a espessura de parede remanescente de tubos. Em conjunto com um aparelho Phased Array, como o detector de defeitos OmniScan®, usar o HydroFORM scanner é uma maneira eficiente de inspecionar corrosão, pois pode fornecer medições precisas de material restante que levam em consideração as reflexões das superfícies internas e externas. O detector de defeitos OmniScan analisa as reflexões do ultrassom e calcula o atraso entre os ecos da superfície externa e interna para fornecer o valor da parede remanescente a cada ponto de 1 mm × 1 mm. |  |
No entanto, em algumas circunstâncias, os inspetores só poderão medir a corrosão externa, ou precisarão distinguir qual é a colaboração da corrosão interna e externa no valor da parede remanescente.
Desafio
Realizar medições manuais de superfícies, como medir pitting, consomem muito tempo e dependem do operador. Os resultados da medição podem variar de usuário para usuário e de inspeção para inspeção. Os inspetores precisam de um método mais seguro para realizar inspeções mais rápidas e mais eficientes. Utilizar o laser para medição de corrosão externa exige maior investimento em equipamentos e formação. Além disso, a inspeção a laser não é capaz de realizar uma avaliação completa da integridade do tubo e não chega à superfície interna do tubo. Estas limitações sinalizam que as inspeções a laser precisam do suporte de mais de uma tecnologia ou sistema, e que podem ocasionar outros desafios à equipe de coordenação de inspeção, gerenciamento de dados e de formação.
Solução
O HydroFORM scanner vem com uma solução para inspeção de corrosão interna de tubos. Com o recurso de coluna de água, que elimina a necessidade de se usar um calço, o HydroFORM scanner apresenta as mesmas vantagens da inspeção de tanque de imersão por Phased Array. Ele proporciona condições excelentes de conformidade e de acoplamento, mesmo em superfícies ásperas.
Quando o HydroFORM scanner é usado com um instrumento multigrupo, a corrosão externa pode ser mapeada ao mesmo tempo que a corrosão interna (parede remanescente) com apenas um rastreamento. O primeiro grupo é otimizado para corrosão interna enquanto o segundo (usando a mesma sonda) é otimizado para mapeamento de corrosão externa. Isto fornece dois C-scan distintos que podem ser analisados diretamente no detector de defeitos OmniScan, em um computador com o software OmniPC™ , ou ser exportado de forma independente em formato CSV. Um software de planilhas pode ser usado para pós-processamento.
Procedimento típico
O procedimento para mapeamento de corrosão externo é similar à aplicação típica do HydroFORM scanner, mas com algumas diferenças paramétricas.
Em primeiro lugar, um grupo de corrosão interna (parede remanescente) precisa ser criado com a lei definida para “linear” em vez de “linear a 0°”. O ângulo de inspeção é 0°.
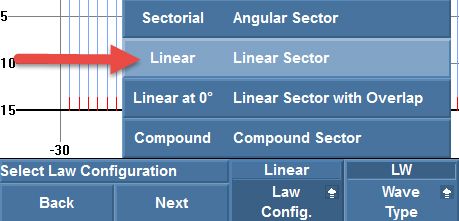
Figura 1: configurar a lei para “linear”
Então, ao criar o segundo grupo para corrosão externa, as configurações do segundo grupo devem ser copiadas, mas o parâmetro calço deve ser alterado para “contato”. Estas configurações permitem a inspeção de superfícies externas do tubo por meio da coluna de água.

Figura 2: selecionar uma sonda de “contato”
A quantidade de elementos é de um por feixe.

Figura 3: definir a quantidade de elementos por feixe para um (1)
O primeiro e o último elemento precisam ser definidos de acordo com as seguintes fórmulas para garantir que os dois grupos tenham a mesma abertura total e cobrir a mesma posição na peça:
| Primeiro elemento: | Quantidade de elementos (primeiro grupo) |
| 2 |
| Último elemento: quantidade total de elementos da sonda — | Quantidade de elementos (primeiro grupo) |
| 2 |
No exemplo abaixo (fig. 4), quatro elementos foram usados no primeiro grupo, então, o primeiro e último elemento do segundo grupo foram definidos para dois e sessenta e dois elementos, respectivamente.
Figura 4: definir o primeiro e o último elemento
O parâmetro de profundidade do foco não é relevante quando o feixe não pode ser focado com apenas um elemento por feixe. Para fins analíticos, este parâmetro é definido para não focado.
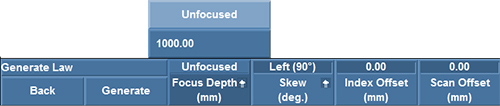
Figura 5: definir a profundidade do foco para “não focado”
É preciso ajustar a velocidade para inserir o valor para água (1.480 m/s, ou 0,0583 pol./μs). Isto assegura a precisão dos valores de profundidade.
Figura 6: definir o atraso do calço e a velocidade
A sonda é colocada em uma área não corroída do tubo, o atraso do calço é ajustado manualmente, então a parede frontal está a 0 mm.
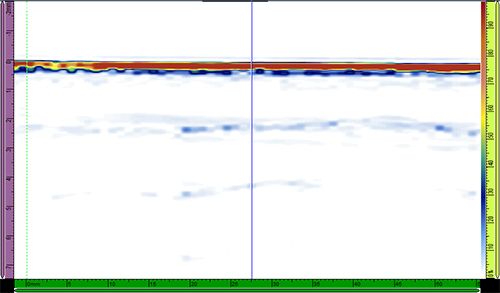
Figura 7: colocar a parede frontal a 0 mm usando atraso de calço
- Como apenas a superfície da peça é considerada e a atenuação do ultrassom na água é marginal, nenhuma correção de ganho em relação ao tempo (TCG) é necessária no segundo grupo.
- Como a sincronização da porta não pode ser usada no grupo de corrosão externa, é importante usar um sistema de suporte de sonda estável, como um dos conjuntos HydroFORM® scanner e MapROVER™ scanner da Olympus. Além disso, um sistema de suporte de sonda instável pode cair em uma depressão acentuada da peça e provocar a perda da referência nominal.
- O rastreamento de linhas não pode ser sobreposto no modo linear. Portanto, é importante conservar o índice delta no parâmetro índice final do menu Rastrear > Área do primeiro grupo (corrosão interna) para definir corretamente o valor do índice mecânico.
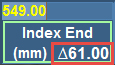
Figura 8: índice delta
ResultadosDados de corrosão em uma amostra corroída A amostra testada é de um tubo de 508 mm de diâmetro externo com espessura nominal de parede de 9 mm com corrosão nas superfícies interna e externa. O rastreamento foi realizado em um eixo circunferencial no diâmetro externo com o HydroFORM scanner e MapROVER automated scanner. A superfície foi rastreada com resolução de 1 mm × 1 mm. | 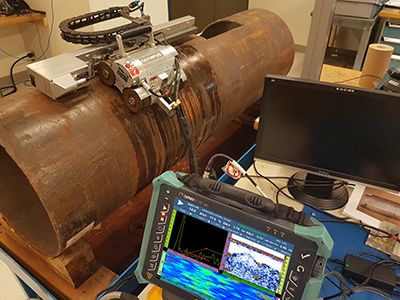 Figura 9: inspeção de um tubo de 50,8 cm |
Visualizações de S-scan e C-scan foram utilizadas para mostrar a corrosão. O primeiro grupo de C-scan (fig. 10) foi usado para visualizar o valor da parede remanescente, levando em consideração a corrosão interna. A cor azul no C-scan representa a espessura nominal, a parede remanescente fica mais fina à medida que a cor passa de amarelo para laranja e de laranja para vermelho. No C-scan, existem quatro áreas onde nós podemos identificar dados incoerentes. Estas áreas mostram onde a corrosão externa interrompe o sinal ultrassônico. | 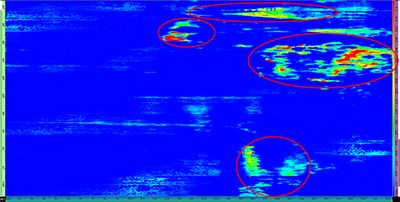 Figura 10: C-scan de parede remanescente com interrupção de sinal causada pela corrosão externa |
No segundo grupo, nós podemos ver a corrosão externa no S-scan (fig. 12) e no C-scan (fig. 11). Para este exemplo, que usa a paleta de cores padrão (paleta de cores típicas para corrosão), quanto mais vermelha for a cor, mais profunda é a corrosão externa. A corrosão externa é identificada com facilidade e está correlacionada com o C-scan da parede remanescente adquirida no primeiro grupo. | 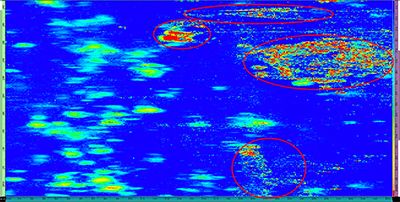 Figura 11: C-scan da corrosão externa com o HydroFORM scanner 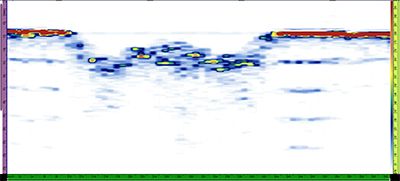 Figura 12: exemplo de C-scan de corrosão externa adquirido com o HydroFORM scanner |
Conclusão
Ao usar este novo procedimento com o HydroFORM scanner da Olympus, agora, é possível mapear a corrosão externa durante uma inspeção normal de corrosão de parede remanescente e interna. Um segundo grupo, otimizado para medição de corrosão externa, pode ser criado usando o detector de defeitos OmniScan MX2. Os dados da corrosão externa e interna (parede remanescente) também podem ser exportados para um arquivo CSV para análise posterior. Este método pode reduzir o tempo da execução da inspeção de corrosão e evitar a formação e o investimento necessário quando se usa várias tecnologias de inspeção.

