Acoustic Influence Mapと感度インデックスの概要
OmniScan™ X3探傷機に導入されたAcoustic Influence Map(AIM)は、トータルフォーカシングメソッド(TFM)スキャンプランの設定に役立つソフトウェア支援ツールです。 AIMでは音波伝搬パス(モードセット)の組み合わせごとに音響ビーム範囲が予測されるので、TFMスキャンプランを最適化して検出率を高めることができます。 ただし、各AIMマップは自己正規化されたものであり、0~−15 dBの対数振幅スケールで表示されるため、AIMマップ単体からさまざまなTFMスキャンプランとの相対的な音響感度を推測することはできません。 この比較を容易にするため、すべてのAIMマップの上部に感度インデックスが表示されます。
AIM感度インデックスの使用方法
感度インデックスは単純に正規化前の各AIMマップの最大振幅であり、受信時の予測される電圧振幅に比例する任意の単位で表示されます。 AIMマップの情報を感度インデックスと組み合わせることで、ユーザーはさまざまなTFM検査設定の音響感度を比較できます。
理解を助ける実例
このアプリケーションノートでは、特定の検査シナリオに対して、AIMと感度インデックスによる情報に基づいて最適なTFM検査モードを選択する例を示します。 この例では最適なTFMモードの選択に焦点を当てていますが、紹介されている手順は、所定のTFMモードに対するプローブとウェッジを選択する際にも使用できます。
この例では、5L32-A32プローブとSA32-N55S斜角ウェッジを結合して行う厚さ25 mmの平棒の表面割れ検査用に、最適なTFMモードを選択することを目的としています。 オリンパスでは研究をセルフタンデムモードに限定しています。このモードが一般に、縦方向の亀裂を「形状に忠実に」表すTFM画像の生成に適しているためです。 OmniScan™ MXUソフトウェアの現在のバージョン(5.1)には、7つのセルフタンデムモードがあり、それぞれのAIMマップが図1~7に示されています。 これらのAIMマップでは、面状欠陥モードを選択して欠陥角度を0°に設定し、表面割れ欠陥の想定される方向に一致させています。
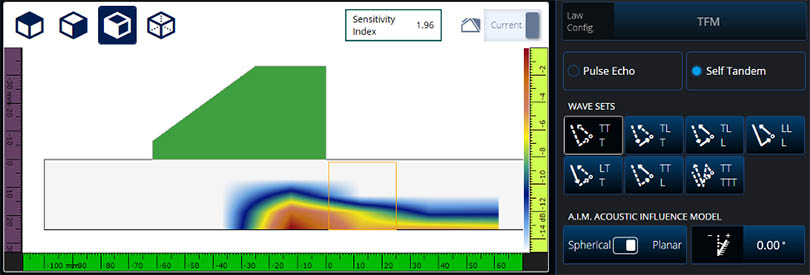
図1:TT-Tモードでの平面AIMマップ
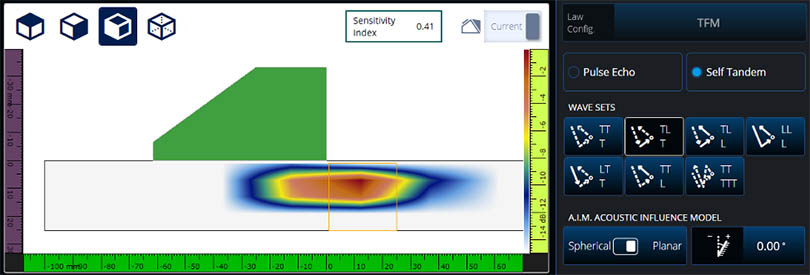
図2:TL-Tモードでの平面AIMマップ
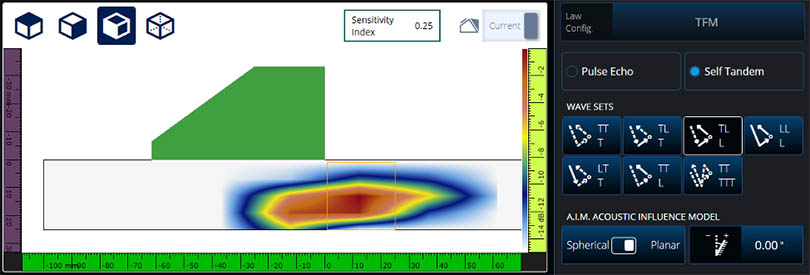
図3:TL-Lモードでの平面AIMマップ
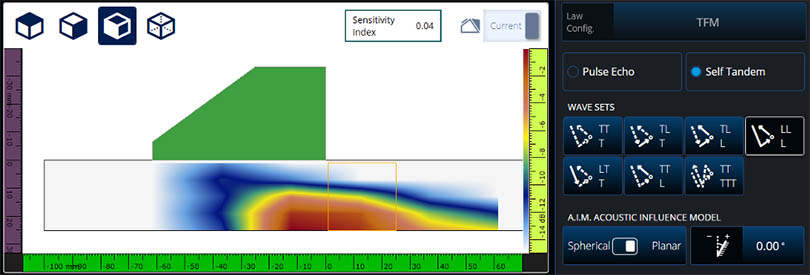
図4:LL-Lモードでの平面AIMマップ
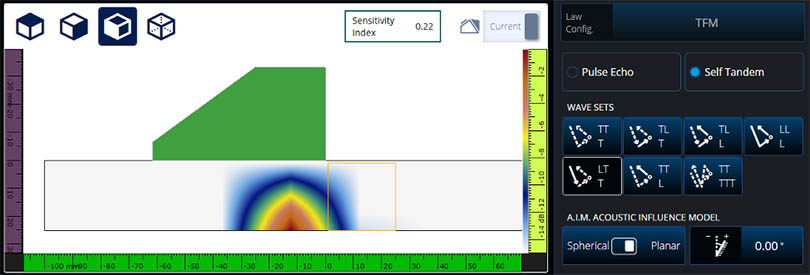
図5:LT-Tモードでの平面AIMマップ
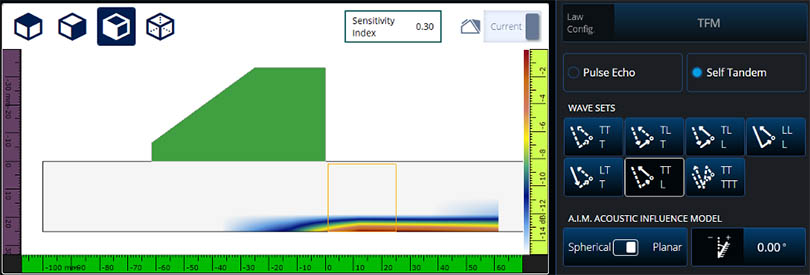
図6:TT-Lモードでの平面AIMマップ
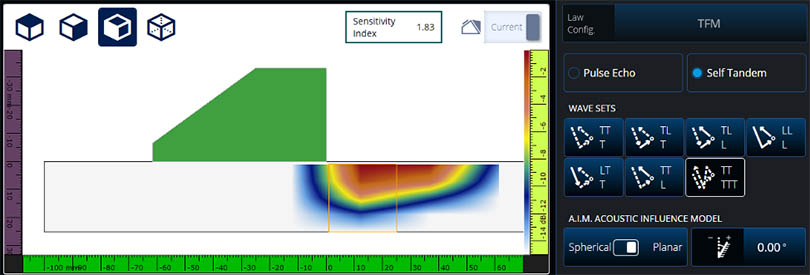
図7:TT-TTT(5T)モードでの平面AIMマップ
TFMモードセットの感度インデックスの比較
AIMマップから、この検査シナリオにはTL-TモードとTT-TTT(5T)モードが最適に思われます。これらのモードでは棒の上面付近の音響範囲が最も優れているからです。 これらの感度インデックスを比較すると、5Tモードの感度インデックスが1.83であるのに対して、TL-Tモードの感度インデックスは0.41です。 この情報に基づいて、5TモードではTL-Tモードに比べて約4.5倍優れたSN比が予想されます。 これらの2つのモードを使用して実験的に取得したTFM画像を図8に示します。
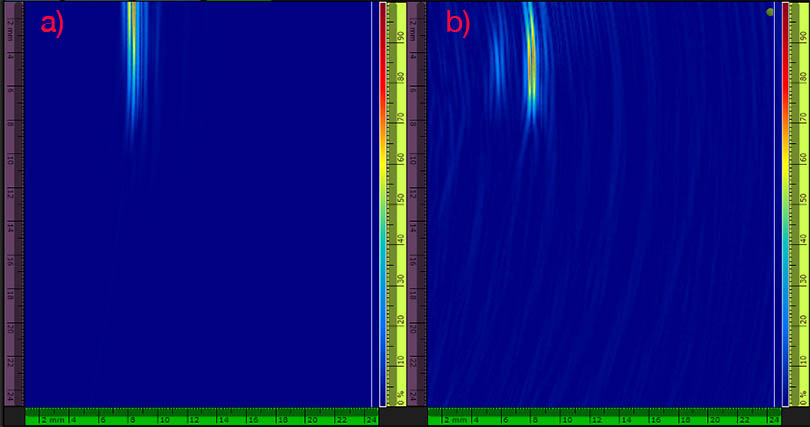
図8:a)5Tモードおよびb)TL-Tモードを使用して取得したTFM画像。 使用されたアナログゲインはa)が16 dB、b)が35 dB。
図8で、5TモードとTL-Tモードのアナログゲインは、ピーク振幅値が80%になるようにそれぞれ16 dBと35 dBに設定されていました。 したがって、5Tモードの音響感度はTL-Tモードと比べて19 dB(~8倍)高くなっています。 このことは、5T TFM画像に示されている低レベルのバックグラウンドノイズからも明らかです。 実験で測定された音響感度とAIM感度インデックスによる予測の相違は、理想的な面状反射源に対する実際の亀裂の偏差によるものです。 図8からは、図2および図7のAIMマップで予測されたとおり、5Tモードの方が縦方向の亀裂が持つ表面割れの性質をより正確に表していることもわかります。
AIMを使用した適切なTFMモードの選択手順のまとめ
上の例から、AIMは特定のTFMモードの音響範囲を正確にモデル化できることと、感度インデックスを使用してさまざまなTFMモードの相対的な音響感度を予測できることがわかります。
最適なTFMモードの選択手順をまとめると、以下のようになります。
- 検査構成に関連するすべてのTFMモードのAIMマップを生成します。 欠陥設定が正しく選択されていることを確認します(球面と平面、面状欠陥の方向など)。
- 対応するAIMマップが検査対象域の適切な音響範囲を示す、TFMモードのサブセットを選択します。 検査対象域のさまざまな部分をカバーするために、複数の補足TFMモードが必要な場合があります。
- TFMモードのサブセットから、AIM感度インデックスが最も高いモードを選択します。