Introduction
Les surfaces intérieures et extérieures des tuyaux faits d’acier au carbone ont tendance à se corroder avec le temps, peu importe leur environnement. Par conséquent, il est nécessaire de les inspecter régulièrement afin d’en évaluer et d’en contrôler l’intégrité. Le scanner HydroFORM® destiné à la cartographie de la corrosion est particulièrement pratique pour mesurer l’épaisseur résiduelle de la paroi des tuyaux. Combiné à un appareil de recherche de défauts à ultrasons multiéléments, comme l’OmniScan® par exemple, l’HydroFORM est un outil efficace pour cartographier la corrosion puisqu’il procure une mesure précise du matériau résiduel à partir des réflexions sur les surfaces interne et externe. L’OmniScan utilise le délai entre les échos provenant des surfaces interne et externe pour déterminer l’épaisseur résiduelle de la paroi sur chaque point de 1 mm × 1 mm. |  |
Néanmoins, dans certains cas, les inspecteurs veulent simplement mesurer la corrosion externe, alors que dans d’autres, ils veulent différencier l’effet de la corrosion externe et interne sur l’épaisseur résiduelle de la paroi.
Enjeu
La prise de mesure sur les surfaces, à l’aide d’un mesureur de piqûre par exemple, prend du temps et les résultats obtenus dépendent des procédures de travail de chaque opérateur. Les résultats peuvent donc varier d’une personne à l’autre et d’une inspection à l’autre. Voilà pourquoi les inspecteurs ont besoin d’une méthode de travail permettant d’améliorer la fiabilité des résultats, et ainsi rendre les inspections plus rapides et plus efficaces. L’utilisation de lasers pour mesurer la corrosion externe est une solution envisageable, mais elle suppose un investissement important en équipement et en formation. En outre, l’inspection au laser ne peut fournir une évaluation complète de l’intégrité du tuyau puisqu’elle ne permet pas d’atteindre la surface interne. Cette restriction signifie que des résultats d’inspections supplémentaires effectuées à l’aide d’autres systèmes ou d’autres technologies doivent venir confirmer les résultats de l’inspection au laser. Cette situation peut entraîner des problèmes liés à la formation, à la gestion de données et à la coordination des différentes équipes d’inspection.
Solution
Le scanner HydroFORM, lui, constitue une solution éprouvée pour inspecter la corrosion interne des tuyaux. En effet, son concept à colonne d’eau novateur qui permet d’éliminer l’utilisation d’un sabot lui confère tous les avantages de l’inspection par ultrasons multiéléments en immersion. Il offre un excellent ajustement à la surface inspectée et un couplage optimal, même sur les surfaces rugueuses.
Lorsque l’HydroFORM est joint à un appareil multigroupe, il est possible de cartographier la corrosion externe en même temps que la corrosion interne (épaisseur résiduelle) au cours d’un même balayage. Le premier groupe est optimisé pour la corrosion interne et le deuxième groupe est optimisé pour la corrosion externe (à l’aide de la même sonde). Cela permet d’obtenir deux C-scans distincts qui peuvent être analysés directement sur l’appareil de recherche de défauts OmniScan ou à l’aide du logiciel OmniPC ™ ou encore exportés dans un fichier CSV. Les feuilles de calcul peuvent servir à un traitement ultérieur.
Procédure typique
La procédure de cartographie de la corrosion externe à l’aide du scanner HydroFORM® est semblable à une application typique de l’appareil, exception faite de quelques paramètres.
D’abord, il faut créer un groupe pour la corrosion interne (épaisseur résiduelle de la paroi) en réglant la configuration de loi du premier groupe à « Linear » plutôt qu’à « Linear at 0 ° ». L’angle d’inspection doit être réglé à 0 °.
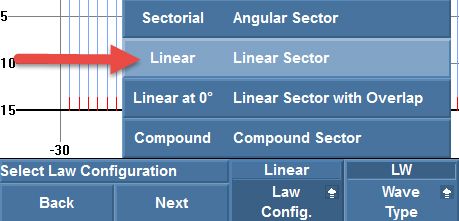
Figure 1 : Réglage de la configuration de loi à « Linear »
Ensuite, pour créer le deuxième groupe pour la corrosion externe, il faut copier les réglages du premier groupe en modifiant le paramètre du sabot pour « Contact ». Cette configuration permet d’inspecter la surface externe du tuyau au travers de la colonne d’eau.

Figure 2 : Sélection d’un sabot de contact
Le nombre d’éléments par faisceau doit être réglé à un.

Figure 3 : Réglage du nombre d’éléments par faisceau à 1
Le premier élément et le dernier élément doivent être réglés selon les formules suivantes pour garantir que les deux groupes ont la même ouverture totale et qu’ils couvrent la même position sur la pièce inspectée :
| Premier élément : | Nombre d’éléments (Premier groupe) |
| 2 |
| Dernier élément : Nombre total d’éléments de la sonde — | Nombre d’éléments (Premier groupe) |
| 2 |
Dans l’exemple ci-dessous (figure 4), on a utilisé quatre éléments pour le premier groupe, donc le premier et le dernier élément du deuxième groupe ont été réglés respectivement à 2 et à 62.
Figure 4 : Réglage du premier et du dernier élément
Le paramètre de profondeur focale n’est pas pertinent puisque le faisceau ne peut être focalisé lorsqu’il n’y a qu’un seul élément par faisceau. À des fins de rapport, ce paramètre est réglé à « Unfocused ».
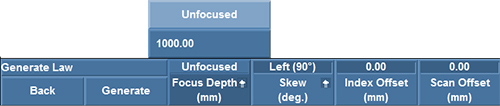
Figure 5 : Réglage de la profondeur focale à « Unfocused »
La vitesse de propagation doit correspondre à celle de l’eau (1480 m/s ou 0,0583 po/μs). Cela permet de garantir l’exactitude des valeurs de profondeur.
Figure 6 : Réglage du délai et de la vitesse du sabot
La sonde est placée sur une zone du tuyau exempte de corrosion et le délai du sabot doit être réglé manuellement de manière à ce que l’écho de surface soit égal à 0 mm.

Figure 7 : Réglage de l’écho de surface à 0 mm à l’aide du délai du sabot
- Comme seule la surface de la pièce est prise en compte et que l’atténuation des ultrasons dans l’eau est minime, il est inutile d’appliquer un gain corrigé en fonction du temps (TCG) sur le deuxième groupe.
- Comme la synchronisation des portes ne peut être utilisée pour le groupe de corrosion externe, il est important d’utiliser un support de sonde stable, comme celui de l’assemblage HydroFORM® et MapROVER™ d’Olympus. De plus, un support instable pourrait tomber s’il rencontre un creux important sur la pièce, ce qui entraînerait une perte de la référence nominale.
- Les lignes de balayage ne doivent pas être superposées en mode linéaire. Par conséquent, il est important de noter le delta de l’index indiqué au paramètre « Index End » du menu « Scan > Area » du premier groupe (corrosion interne) pour régler correctement le décalage mécanique sur l’axe d’index.
Figure 8 : Delta d’index
RésultatsDonnées de corrosion sur un échantillon corrodé L’inspection a été effectuée sur un tuyau d’un diamètre extérieur de 508 mm et d’une épaisseur nominale de 9 mm corrodé sur les surfaces interne et externe. Le balayage a été effectué sur l’axe circonférentiel du diamètre extérieur du tuyau au moyen d’un scanner HydroFORM et d’un scanner MapROVER automatisé. La surface a été couverte selon une résolution de 1 mm × 1 mm. | 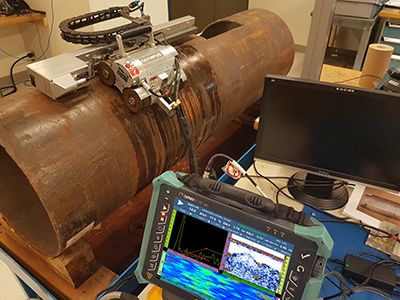 Figure 9 : Inspection sur un tuyau de 508 mm |
Les vues S-scan et C-scan ont servi à visualiser la corrosion. Le C-scan du premier groupe (figure 10) a servi à visualiser la valeur de l’épaisseur résiduelle de la paroi, en tenant compte de la corrosion interne. La couleur bleue du C-scan représente l’épaisseur nominale, alors que la progression du jaune vers l’orange jusqu’au rouge indique l’amincissement progressif de l’épaisseur résiduelle. Dans le C-scan, on relève des données incohérentes dans quatre zones. Ces zones représentent les endroits où le signal ultrasonore est interrompu par la corrosion externe. | 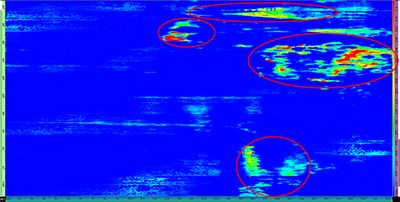 Figure 10 : C-scan de l’épaisseur résiduelle montrant une interruption de signal causée par la corrosion externe |
Le deuxième groupe montre les zones de corrosion dans le S-scan (figure 12) et le C-scan (figure 11). Pour cet exemple, nous avons utilisé une palette de couleurs personnalisée (palette typique pour l’inspection de la corrosion) : plus le rouge est intense, plus la corrosion externe est profonde. La corrosion externe est facilement identifiable et elle correspond au C-scan de l’épaisseur résiduelle acquise par le premier groupe. | 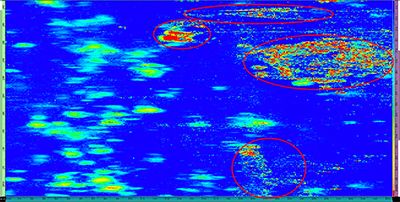 Figure 11 : C-scan de corrosion externe généré à l’aide du scanner HydroFORM 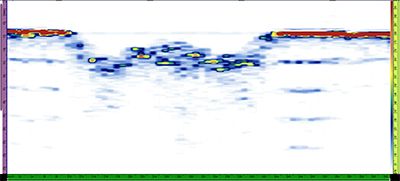 Figure 12 : S-scan de corrosion externe généré à l’aide du scanner HydroFORM |
Conclusion
Cette nouvelle procédure d’inspection tirant profit du scanner HydroFORM d’Olympus permet dorénavant de cartographier la corrosion externe au cours d’une application courante d’inspection de corrosion interne (épaisseur résiduelle de la paroi). Un deuxième groupe optimisé pour mesurer la corrosion externe peut être créé sur l’appareil de recherche de défauts OmniScan MX2. Les données de corrosion interne et externe (épaisseur résiduelle) peuvent aussi être exportées sous forme de fichier CSV à des fins d’analyses ultérieures. Cette méthode permet de réduire le temps d’inspection et d’éviter les exigences de formation ou d’investissement requises lorsque plusieurs technologies d’inspection doivent être utilisées.


