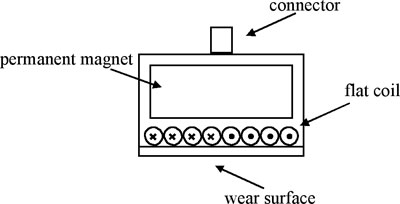
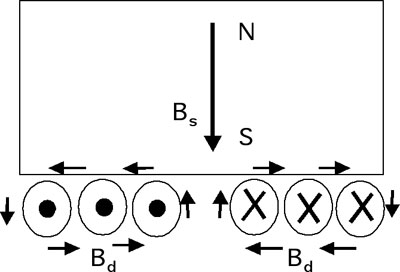
Recommended instruments: BackgroundThe very high temperatures found inside steam boilers (in excess of 1500 degrees Fahrenheit, or 800 degrees Celsius) can cause the formation of a specific type of hard, brittle iron oxide called magnetite on the inside and outside surfaces of steel boiler tubing. The presence of this oxide layer on the outside of tubes can interfere with ultrasonic wall thickness measurements using common dual element transducers, both because it can have a very rough surface that prevents proper sound coupling, and because the oxide thickness is added to the steel thickness. However, as its name implies, magnetite is magnetic, and that property permits the use of magnetostrictive EMAT (electromagnetic acoustic transducer), such as the Panametrics-NDT E110-SB. EMATs offer several advantages over conventional dual element piezoelectric transducers: the need to remove oxide scale is eliminated, the scale thickness is not added into the wall thickness measurement, and measurements can be made very quickly and without the need for liquid couplant. The primary limitation of magnetostrictive EMATs is that they only work when scale is present and bonded to the outside of the boiler tube. Additionally, the minimum measurable wall thickness and measurement accuracy is not nearly as good as what can be achieved with a conventional dual, and EMATs are relatively insensitive to small internal pits. For these reasons, EMATs are often used for quick initial wall thickness surveys, while duals can then be used to take a closer look at areas of concern. Theory of operationThere are two types of EMATs used within the NDT industry. Those known as Lorentz EMATs do not require the presence of oxide scale, but they do require very high driving power. Magnetostrictive EMATs, such as Olympus' E110-SB do require scale, but they work at the much lower power levels typical of field portable ultrasonic gauges and flaw detectors. A magnetostructive EMAT consists of a strong permanent magnet and a coil, which acts as an electromagnet when driven by the excitation pulse from the test instrument, as seen in Figure 1. The permanent magnet creates a magnetic field perpendicular to the surface of the scale (Bs in the figure below), while the dynamic field created by the electromagnet (Bd) causes the scale to be pulled radially outward and inward as the coil is pulsed, as seen in Figure 2. This motion generates a normal incidence shear wave in the scale, which then propagates into the steel. Essentially, the scale acts as the active transducer element to generate the sound pulse. The frequency of the sound pulse will vary as oxide thickness changes, increasing as oxide becomes thinner and decreasing as oxide becomes thicker. With typically thin scale buildups, the frequency will be approximately 5 MHz. The process also works in reverse to generate a voltage in the coil when the returning shear wave echo vibrates the scale.
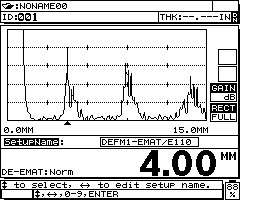
Because the scale itself is the transducer element, scale roughness is not a coupling issue, and the scale is not added to the thickness measurement. The EMAT generates a shear wave, so the instrument must be calibrated to a shear wave velocity of approximately 0.1280 in./µs (3,240 m/s) in typical carbon steel. Typical measurement accuracy with the E110-SB EMAT transducer is ± 0.010 in. (0.25 mm), with a minimum measurable thickness of at least 0.080 in. (2.0 mm) depending on material properties. Setup and measurement proceduresThe quality of ultrasonic echoes in EMAT applications depends, in part, on the consistency of the oxide scale layer, which can vary from point to point on a given boiler tube. If usable echoes cannot be obtained at one point, try another point nearby. Also, the E110-SB transducer incorporates an adjustable standoff that varies the distance between the transducer face and the surface of the boiler tube. Adjusting this standoff distance helps optimize the echo response in many cases.
|
Olympus Industrial Resources
Application Notes
Back to Resources


Measurement of wall thickness of steam boiler tubes with EMAT transducers


Products Used for This Application
EMATs (electromagnetic acoustic transducers) are single element transducers that use a magnetostrictive effect to transmit and receive ultrasonic waves. EMATs offer unique advantages—they can be used without couplant, there’s no need to remove external scale prior to an inspection, they can be used in contact or at a small distance from the surface, they can be used on hot parts, and they work well on small-diameter pipes.
The EPOCH 650 is a conventional ultrasonic flaw detector with excellent inspection performance and usability for a wide variety of applications. This intuitive, rugged instrument is a continuation of the popular EPOCH 600 flaw detector with additional capabilities.
The 38DL PLUS is an advanced ultrasonic thickness gauge. Uses dual element transducer for internal corrosion applications, and has features that include THRU-COAT technology and echo-to-echo. Uses single element transducers for very precise thickness measurements of thin, very thick, or multilayer materials.
Sorry, this page is not available in your country
Let us know what you're looking for by filling out the form below.